







EVO-PROSTHESIS: AN ASSISTIVE DEVICE FOR BALANCE CORRECTION
SUMMARY:
I was formerly part of a research group with the University of Pittsburgh Department of Rehabilitation Science and Technology (RST) developing a novel assistive device for individuals with balance issues. This device takes the form of a prosthetic tail encased within a backpack that generates corrective torques to maintain the balance of the wearer. Because tails are not native to human anatomy, our research group classifies this device as an Evo-Prosthesis (or Evolutionary Prosthesis), a prosthesis that introduces or augments functions that were not granted to humans through evolution. See bottom of page for abstract submissions.
SKILLS LEARNED: Literature review, Rapid prototyping experience, Basic electronics experience, Arduino coding, Conference abstract/poster writing
RESEARCH GROUP MEMBERS:
-
Zachary Roy
-
Nathaniel Mitrik
-
Goeran Fiedler, Phd.
-
David Brienza, Phd.
-
Alex Delazio, MSc
TIME INVOLVED:
-
May 2020 - April 2021
AWARDS:
-
Randall Family Big Idea Competition (RFBIC) Finalist -- April 2021
DEVICE DEVELOPMENT
The Problem
Around 13.8 million Americans aged 65 and older suffer from falls each year. Additionally 1 in 5 of those falls lead to a serious injury. All these falls and fall related injuries cost the American healthcare system over $50 billion annually, with $12 billion of that total cost being out-of-pocket.
To prevent falls in older populations, standard assistive devices such as canes and walkers are used to maintain stability and increase balance confidence. However, these standard assistive devices possess various limitations like heaviness, obtrusiveness, restriction of the use of one or both hands, inability to navigate stairs safely, and improper use can lead to poor posture.

Researching, Sketching, and Pretotyping
The information related to our specific problem was revealed from an extensive customer discovery that was conducted prior to my involvement in the project. Subsequently, I was involved in a 3-week literature review on fall injuries and statistics. Along with fall statistics and injuries, I also researched publications on animal tail mechanics, human balance models, and existing fall prevention systems.
The next step was to begin designing and "pretotyping" some ideas. I initially developed several sketches of the Evo-Prosthesis concepts (informally dubbed Fairy-Tail at the beginning of project), each possessing different mechanisms for balance correction. The goal was to brainstorm several different approaches to solve the problem given the design parameters.
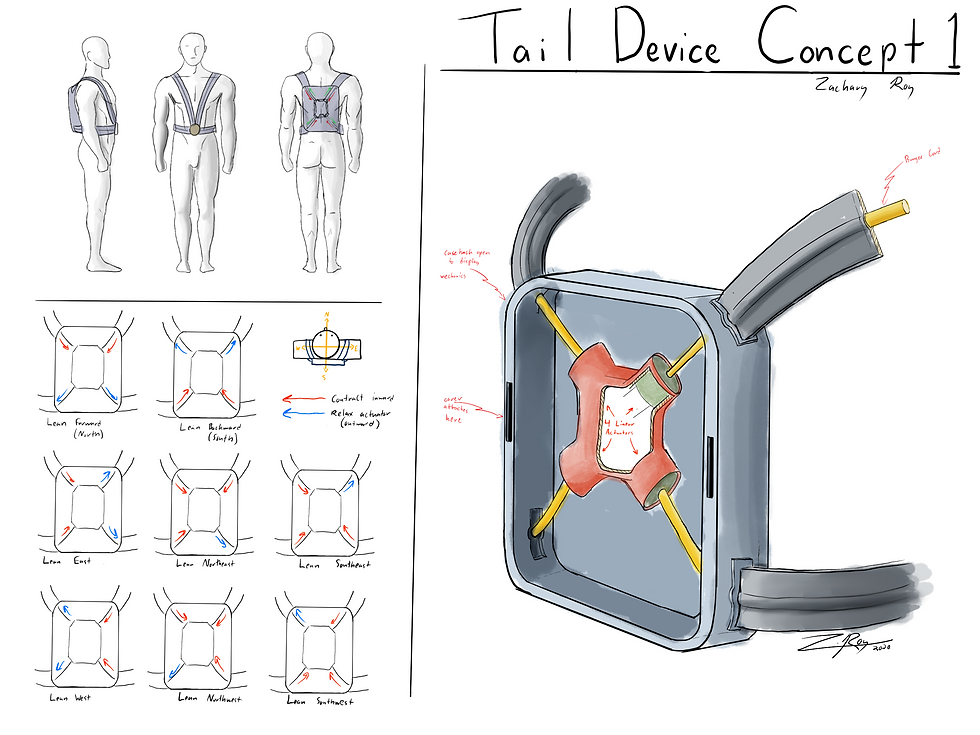
Evo-Prosthesis Concept 1
This concept was created in the early days of the project.
In theory, the device would be comparable in size to a backpack. An actuating motor contained within the backpack would pull on bungee cables running through the straps, causing forces to be placed on the wearers body. These pulling forces would correct the user's balance in the instance of a fall.
This design was not pursued past the sketching phase.
Initial Concept Sketch

Pretotype sketch to show basic functioning and structure

Physical pretotype constructed out of a back brace, plastic tubing, thin rope, wood blocks, springs, and Gorilla Tape.
Initial Concept Sketch
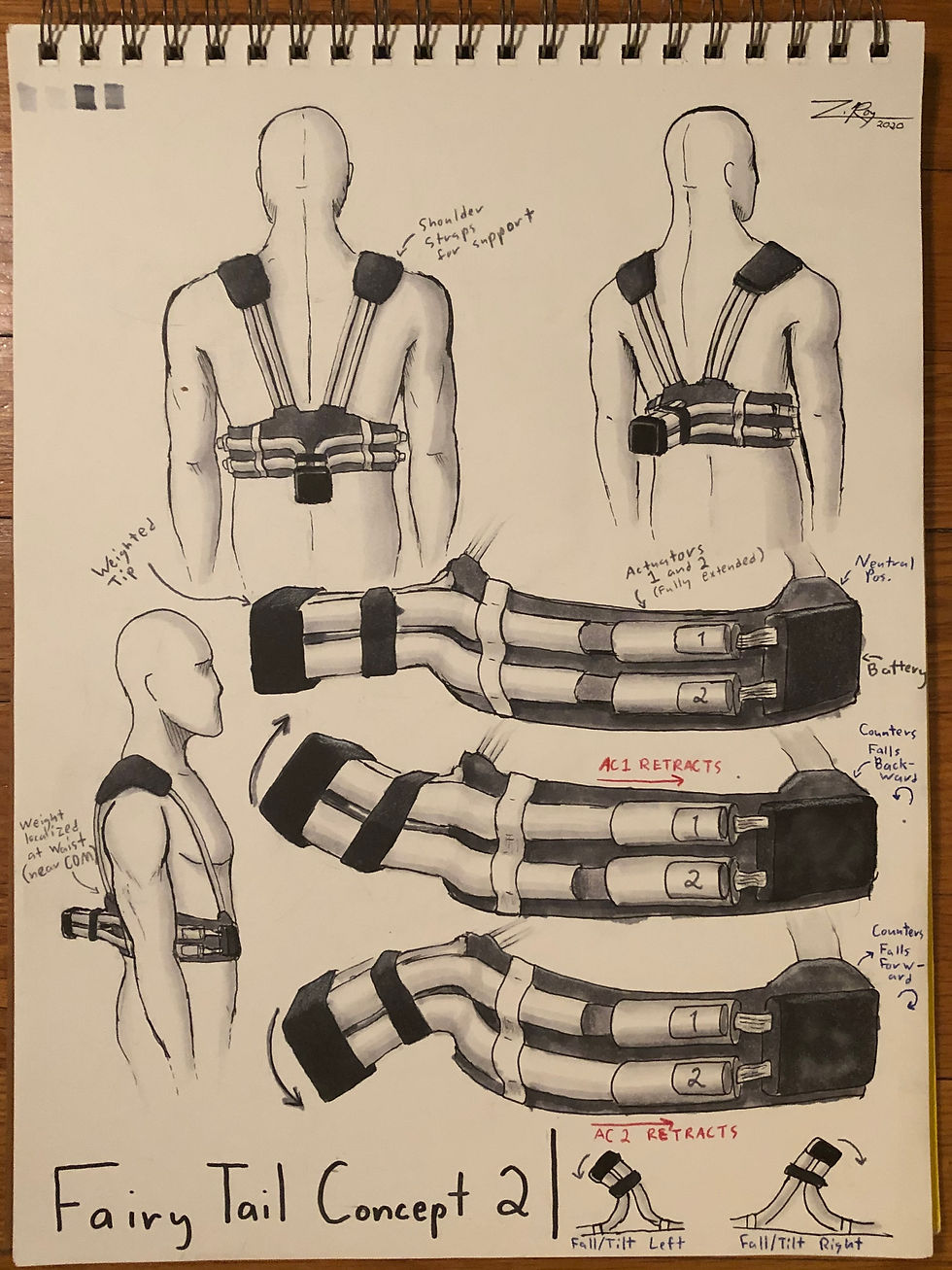
Evo-Prosthesis Concept 2
This concept was created after the literature review several weeks into the project.
Image 1
In theory, the device would be a belt-style wearable with supporting shoulder straps placed at the mid-back (approximate human Center-of-Mass). In the back of the device was a weighted tail controlled by 4 actuating cables in a square formation. Synchronized contraction of different cables would cause the weighted tail to swing in either of the sagittal or transverse planes.
Image 2 & 3
I constructed a human-powered "pretotype" to see if the tail-swing mechanism was a viable approach. The pretotype was constructed using a back brace (belt structure), plastic tubing, thin rope, springs (actuation mechanisms), and wood blocks (tail structures).
The concept was determined to be too complex and not viable for continued prototyping. This design was not pursued past the pretotyping phase.

Infographic detailing the process of how the rotary motor driven prototype will correct the balance of the wearer.

Pretotype version of Evo-prosthesis concept 3 comprised of right angle drill (tail) with back brace, belt, and attachment screw to back brace (human/device interface).
Infographic detailing the process of how the rotary motor driven prototype will correct the balance of the wearer.
Evo-Prosthesis Concept 3
This concept was proposed after the Concept 2 Pretotype testing. In theory, this device will be a rotary-motor driven prosthetic tail that will be encased within a backpack.
Image 1
This infographic illustrates how the rotary motor-driven tail device corrects the user's balance. As the user begins to fall, the device will generate a corrective torque and restore the balance of the wearer. This will occur in the lateral directions and happen continuously while walking.
Image 2
A pretotype device was then constructed for device was "designed by modifying a 20 V battery-powered right-angle drill. The trigger mechanism was removed such that the drill could be activated away from the wearer. The drill was attached to the lower back of subjects via a body shell component similar to a trunk orthosis" (Roy et al.).
This design was pursued through pretotyping, prototype testing,
Bench Testing and Prototype Development
HUMAN BALANCE DISRUPTION (HBD) TEST
Hypothesis
For this test, I proposed that the torques generated by the rotary-motor driven tail device should cause a significant observable disruption in human balance. To set up the test, we attached our prototype device to test participant via back brace as shown on the right and tracked balance with balance sensor (Biomech Inc, Midlothian, VA) placed on forehead.
The user stood still for 10 seconds while their balance was tracked. During some tests, the drill was temporarily activated at a random point during 10 test period, disrupting the user’s balance.
Additionally, the balance sensor captured body movements and balance disruptions during each test and compiled a Composite Balance Score (CBS) index. When standing still with no disruption, the CBS index was around 1. The greater the disruption, the larger the CBS index would be.
Results
Our results showed that our prototype device was able to cause a statistically significant disruption in the balance of the wearer through a one-tailed paired t-test conducted on the CBS index.

Image taken during one of the trails of the HBD Test
Image taken during one of the trails of the HBD Test
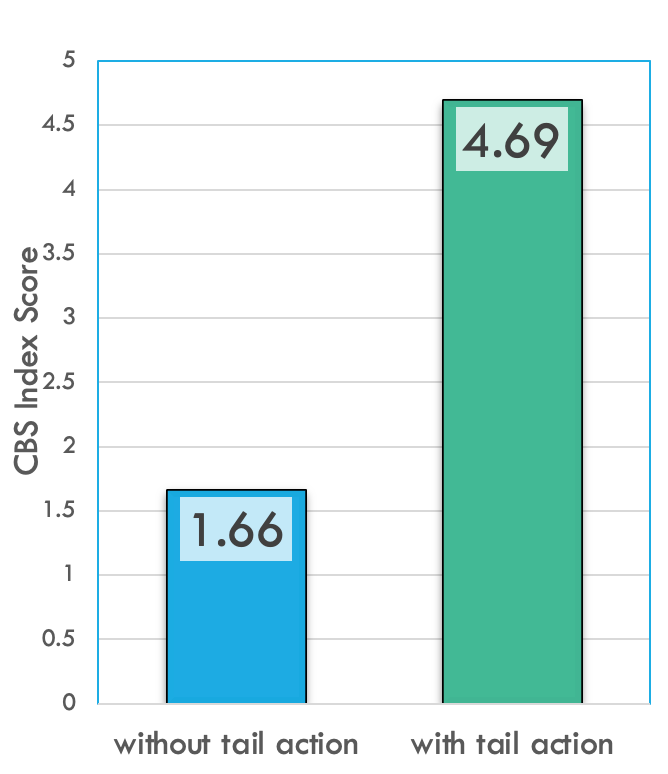
This chart shows the average CBS index both with and without tail action with the y-axis represents the CBS index and the x-axis represents the two test conditions. The CBS index without tail activation was averaged at 1.66 shown by the blue bar while the CBS index with tail activation was noticeably larger, averaged at 4.69 shown by the green bar.

This chart shows how the CBS index changes during one of the “with tail action” test. Prior to the tail activation the CBS score is stable around 1. As emphasized by the red bar, the activation of the tail caused the CBS Index score to increase to around 5 in less 0.5 seconds, meaning the tail activation caused a significant disruption in the test participant’s balance.
This chart shows the average CBS index both with and without tail action with the y-axis represents the CBS index and the x-axis represents the two test conditions. The CBS index without tail activation was averaged at 1.66 shown by the blue bar while the CBS index with tail activation was noticeably larger, averaged at 4.69 shown by the green bar.
The success of this test allowed our team to progress to another, more controlled bench test, the Inverted Pendulum Balance Test.
INVERTED PENDULUM BALANCE (IPB) TEST
Hypothesis
This test utilized an inverted pendulum model of human balance which simulates a person’s balance by simplifying body sway with a pivot at the bottom representing the ankle and a weight at the top of the pendulum, representing a person’s center of mass.
For this test, I proposed that an appropriately dosed torque provided by our prototype device should produce an observable change in the position of the pendulum. To set up the test, we attached our prototype device to an inverted pendulum model while holding the model at a fixed angle outside its base of support.
Results
Shown below is our inverted pendulum model made out of PVC pipe and our prototype tail device.


When the pendulum was released, the device was activated, causing a counter torque to be generated on the pendulum. Here you can see the inverted pendulum change positions to an almost perpendicular position and our tail device swinging.
Recordings and photos like the ones shown above were taken during our tests. These recordings were used to capture the initial and final angles of the device and pendulum with respect to the horizontal and vertical respectively. Our results showed the activation of our tail device was able to produce an observable change in pendulum position.
Equations using the angles measured from the recordings were derived to track the center of mass (COM) of the system by tracking the systems's overall movement given a set of parameters which included the person’s/pendulum’s COM height, weight, and perturbation angle. These equations are shown below.
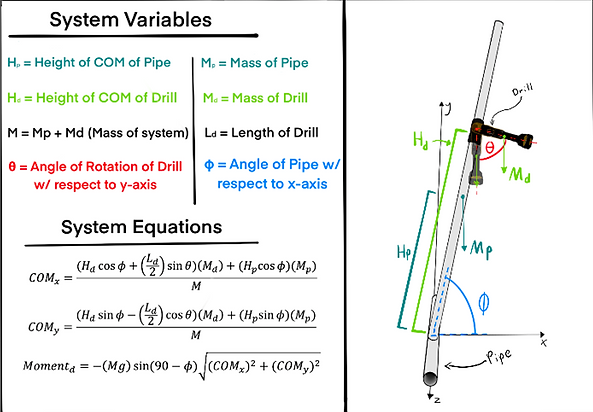
When the equations are balanced, our x-component of COM is around 0 and our y-component is around the person’s/pendulum’s COM.
By fixing the height, weight, and max threshold angle, or the max angle our device would detect and correct a fall, the necessary corrective torque to prevent falling could be determined which will help us determine how powerful our rotary motor would need to be. This is pretty important once we go to revise our device.
The success of this test allowed our team to begin redesigning the device for a more advanced prototype that could automatically detect balance disruptions to generate corrective torques to maintain balance detection.
Accepted Abstract Submissions
PROOF OF CONCEPT TESTING FOR AN INERTIA-BASED PROSTHETIC TAIL
Zachary Roy, Nathaniel Mitrik, Alexandra Delazio, David Brienza, Goeran Fiedler
Submitted to American Academy of Orthotists & Prosthetists 47th Annual Meeting & Scientific Symposium
INSPIRATIONAL TAILS FROM THE LITERATURE: IMPLICATIONS FOR PROSTHETICS
Nathaniel Mitrik, Zachary Roy, Alexandra Delazio, David Brienza, Goeran Fiedler
Submitted to American Academy of Orthotists & Prosthetists (AAOP) 47th Annual Meeting & Scientific Symposium
INERTIA-BASED PROSTHETIC TAILS: BALANCE IMPROVEMENT, EQUATION DEVELOPMENT, AND PROOF-OF-CONCEPT
Nathaniel Mitrik, Zachary Roy, Alexandra Delazio, David Brienza, Goeran Fiedler
Submitted to 2020 Biomedical Engineering Society (BMES) Virtual Annual Meeting
Departure From the Project
As of April 2021, I minimized my involvement in the Evo-Prosthesis project in order to increase my involvement in the API Lower Limb Project and assume the role of project manager of the Pitt API production team for Summer 2021. Even though I am no longer on the project, I still make myself available to discuss, brainstorm ideas, and provide feedback to my former project partner, Nathaniel, in an effort to help facilitate progress on the Evo-Prosthesis project.
Currently Seeking Intellectual Property on Project. Further Information Coming Soon.